 【資料圖】
【資料圖】
據(jù)了解,SWIM系統(tǒng)由厘米級3D打印游泳微型機器人組成,長度約12厘米,配備MEMS傳感器,由微型執(zhí)行器驅(qū)動,并通過超聲波進行無線控制。
攜帶SWIM機器人的著陸器降落在衛(wèi)星冰殼上后,會釋放一個穿冰機器人,利用其核電池的熱量融化一條穿過冰層通往下方海洋的隧道。一旦到達(dá)那里,穿冰機器人將釋放大約50個SWIM機器人,開始獨立探索寒冷的水域。
每個SWIM機器人都有自己的推進系統(tǒng)、機載計算系統(tǒng)和超聲波通信系統(tǒng),還配有簡單的溫度、鹽度、酸度和壓力傳感器。此外,它們還將攜帶監(jiān)測生物標(biāo)志物(生命跡象)的化學(xué)傳感器。
SWIM能夠?qū)ESAME機器人無法觸及的海水進行主動采樣,以及對所需海洋特性、宜居性指標(biāo)和潛在生物標(biāo)志物的時間和空間分布測量。這些能力共同將使科學(xué)家能夠更好地描述/了解外星海洋的組成和 NASA 首次海洋訪問任務(wù)的可居住性。
NASA計劃在2024年執(zhí)行的“歐羅巴快艇”任務(wù)中部署這些游泳機器人。
-

【天天新視野】隔夜歐美·7月5日
頭條 22-07-05
-

-

焦點信息:立方風(fēng)控鳥·早報(7月5日)
頭條 22-07-05
-

世界視點!安陽與中國人壽等銀保機構(gòu)簽署戰(zhàn)略合作協(xié)議
頭條 22-07-05
-

全球觀熱點:鄭州交警開展“一盔一帶”查處專項行動,為期三個月
頭條 22-07-05
-

-

世界信息:立方風(fēng)控鳥·晚報(7月4日)
頭條 22-07-05
-

全球熱門:設(shè)研院二股東變更!河南規(guī)模5000億國企無償受讓14.45%股份
頭條 22-07-05
-

全球滾動:二手房成交參考價格已取消?西安住建局:可尊重賣方意愿
頭條 22-07-05
-

焦點!生豬與飼料價格齊飛 全行業(yè)扭虧是大概率事件
頭條 22-07-05
-

-

看點:前6個月南陽市完成省重點項目投資954.2億
頭條 22-07-04
-
-

信息:安陽今年已爭取115.08億元專項債 118個項目獲支持
頭條 22-07-04
-

當(dāng)前信息:新鄉(xiāng)慧聯(lián)電子啟動IPO輔導(dǎo)備案
頭條 22-07-04
-
【天天快播報】河南首批5968.28萬元穩(wěn)崗返還資金已撥付到位
頭條 22-07-04
-

環(huán)球速讀:總投資5億元!平頂山舞鋼市與河鋼集團簽約建設(shè)廢鋼加工基地項目
頭條 22-07-04
-

速訊:立方風(fēng)控鳥·早報(7月4日)
頭條 22-07-04
-

精彩看點:供應(yīng)鏈金融專場再啟!河南省線上常態(tài)化銀企對接邀你周一見
頭條 22-07-04
-

全球速讀:期待!7月鄭州將舉辦這些會展
頭條 22-07-04
-

-

天天觀察:贛鋒鋰業(yè)董事長回應(yīng)被證監(jiān)會立案
頭條 22-07-04
-

全球快報:海外最大中國股票基金減持寧德時代
頭條 22-07-04
-

今亮點!國家衛(wèi)健委:昨日新增75例本土確診病例 新增310例本土無癥狀感染者
頭條 22-07-03
-
天天快報!我國數(shù)字經(jīng)濟規(guī)模超45萬億元
頭條 22-07-03
-
環(huán)球熱推薦:何雄會見深圳和而泰智能控制有限公司董事長劉建偉一行
頭條 22-07-03
-

【獨家】攜多個場景生態(tài)平臺 興業(yè)銀行鄭州分行亮相第二屆數(shù)博會
頭條 22-07-03
-
天天熱資訊!總投資9.97億元!河南能源30萬噸MMA一期項目開工
頭條 22-07-03
-

每日簡訊:最高5萬元!駐馬店最新購房補貼申請流程公布
頭條 22-07-03
-

-

今日觀點!郵儲銀行河南省分行榮獲“數(shù)字普惠特別貢獻(xiàn)獎”
頭條 22-07-03
-
每日熱門:河南老教授捐出8208萬后,又捐300萬!這才是該追的星!
頭條 22-07-02
-

環(huán)球熱資訊!隔夜歐美·7月2日
頭條 22-07-02
-
當(dāng)前資訊!安陽市委書記袁家健會見深圳豐網(wǎng)速運有限公司CEO周建一行
頭條 22-07-02
-

【獨家】立方風(fēng)控鳥·早報(7月2日)
頭條 22-07-02
-

快資訊:總價超2400億!東航、南航、國航向空客購買292架飛機
頭條 22-07-02
-

全球新動態(tài):新鄉(xiāng)財政撥款數(shù)千萬元為群眾投保,這些損失可賠付
頭條 22-07-02
-

焦點訊息:一年出口超300億元!香港人每天的餐桌上,都有來自河南的肉和菜
頭條 22-07-02
-

天天熱點評!立發(fā)風(fēng)控鳥·晚報(7月1日)
頭條 22-07-02
-

每日速讀!全球500位超級富豪上半年財富總計縮水1.4萬億美元,創(chuàng)史上最大跌幅
頭條 22-07-02
-

天天快資訊丨國家衛(wèi)健委:昨日新增本土確診病例12例、本土無癥狀感染者151例
頭條 22-07-01
-
天天視訊!總投資110億元,新鄉(xiāng)第二批41個城建項目集中開工
頭條 22-07-01
-

環(huán)球訊息:上海農(nóng)投集團、上海康養(yǎng)集團正式揭牌成立
頭條 22-07-01
-
天天時訊:總投資5.2億元!鄭大一附院將建設(shè)國家緊急醫(yī)學(xué)救治基地
頭條 22-07-01
-

環(huán)球關(guān)注:隔夜歐美·7月1日
頭條 22-07-01
-

全球通訊!樓陽生到鄭州航空港經(jīng)濟綜合實驗區(qū)調(diào)研
頭條 22-07-01
-

【天天聚看點】立方風(fēng)控鳥·晚報(6月30日)
頭條 22-07-01
-

-
微速訊:繼東亞、北美物流專線升級后,鄭州郵包直飛歐洲時效再縮短
頭條 22-07-01
-

環(huán)球要聞:總投資1448億元!南陽市157個合作項目簽約
頭條 22-07-01
-

天天微頭條丨今天是最后一天!千萬別忘做這件事!關(guān)乎你的錢袋子→
頭條 22-06-30
-

【世界聚看點】騎仕精釀董事長劉元昌:讓年輕人去研究“年輕人”
頭條 22-06-30
-

世界觀察:河南擬發(fā)行108. 06億元地方債,含7. 36億元新增一般債
頭條 22-06-30
-

【世界報資訊】開封市一項目獲2350萬元中央預(yù)算內(nèi)資金支持
頭條 22-06-30
-




















































































































- 【天天新視野】NASA將開發(fā)微型游泳機器人:2022-07-05
- 每日簡訊:鄭州10所市屬高中今秋建成,來看2022-07-05
- 環(huán)球短訊!“人類搖籃”中的南方古猿化石或2022-07-05
- 【世界聚看點】【“三個一批” 一年間】項2022-07-05
- 環(huán)球熱點評!NASA“露西號”航天器太陽能陣2022-07-05
- 今熱點:7月4日河南無新增本土確診病例2022-07-05
- 播報:比你想象的更聰明:科學(xué)家發(fā)現(xiàn)狗對熟2022-07-05
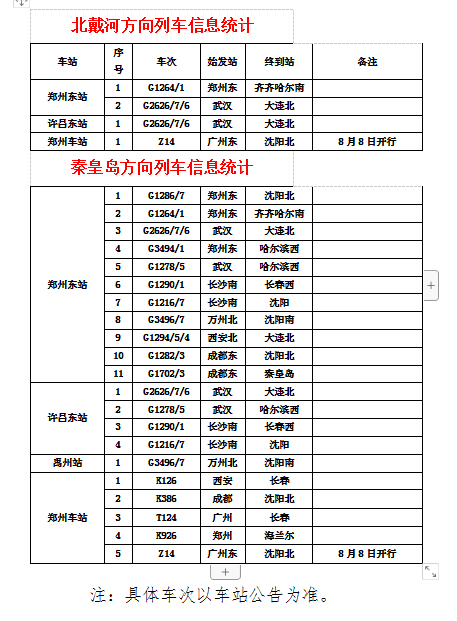
- 提醒!這些方向列車需要二次安檢 請務(wù)必提2022-07-05
- 河南啟動突出交通違法行為專項整治百日行動2022-07-05
- 河南省首批穩(wěn)崗返還資金5968.28萬到位 惠2022-07-05
- 速看!河南省防汛抗旱指揮部啟動防汛四級應(yīng)2022-07-05
- 河南省社會責(zé)任企業(yè)名單出爐 多個集團入選2022-07-05
- 2021年度河南省老齡工作和老齡健康工作先進2022-07-05
- 信陽市“房票”政策實施仨月成效如何?探索2022-07-05
- 鄭州交警開展為期3個月的“一盔一帶”查處2022-07-05
- 鄭州10所市屬高中今秋建成 讓更多省會學(xué)子2022-07-05
- 鄭州高新區(qū)關(guān)于“高新區(qū)教師招聘考試”有關(guān)2022-07-05
- @河南2022年困難畢業(yè)生 符合條件可申請2002022-07-05
- 焦點快報!泌陽縣氣象局發(fā)布暴雨藍(lán)色預(yù)警「I2022-07-05
- 【新要聞】桐柏縣氣象臺發(fā)布暴雨橙色預(yù)警「2022-07-05
- 今日視點:IV級應(yīng)急響應(yīng)啟動!周口今晚大雨2022-07-05
- 【天天新視野】隔夜歐美·7月5日2022-07-05
- 全球快播:漯河交警化身“奶爸”,考場外幫2022-07-05
- 環(huán)球看點!茅臺再招人:人均年薪13萬,8732022-07-05
- 焦點信息:立方風(fēng)控鳥·早報(7月5日)2022-07-05
- 環(huán)球微頭條丨平頂山市氣象局啟動防汛Ⅳ級應(yīng)2022-07-05
- 環(huán)球時訊:胰島素集采在31省全面落地2022-07-05
- 環(huán)球要聞:王亞平人民日報撰文講述出艙:“2022-07-05
- 今日熱搜:黑龍江伊春伊美區(qū)通報桃源小區(qū)22022-07-05
- 全球焦點!國家發(fā)改委回應(yīng)豬價過快上漲2022-07-05
精彩推薦


閱讀排行
- 每日簡訊:鄭州10所市屬高中今秋建成,來看都有哪些→
- 【世界聚看點】【“三個一批” 一年間】項目建設(shè)為何站C位?
- 今熱點:7月4日河南無新增本土確診病例
- 河南啟動突出交通違法行為專項整治百日行動 嚴(yán)查肇事和酒駕
- 河南省首批穩(wěn)崗返還資金5968.28萬到位 惠及484家企業(yè)12.1萬名職工
- 速看!河南省防汛抗旱指揮部啟動防汛四級應(yīng)急響應(yīng)
- 2021年度河南省老齡工作和老齡健康工作先進單位和先進個人名單公布
- @河南2022年困難畢業(yè)生 符合條件可申請2000元求職創(chuàng)業(yè)補貼
- 熱訊:嚴(yán)查肇事和酒駕!河南啟動突出交通違法行為專項整治百日行動
- 天天通訊!鄭州:騎車不戴頭盔要打“小黃旗”執(zhí)勤 坐機動車后排不系安全帶會受罰









